ChibiOS 开发指导之二 - 开始编译
本文适用于以下场景:
- 基于 ChibiOS 做嵌入式应用开发
- 学习 ChibiOS 内核或驱动源代码
准备
下面我们拿其中一个目录来讲解一下,如何开始编译、开发这套代码,如果你要开始一个新项目,那么只需要找一个最接近你硬件平台的这样一个目录为模板,拷贝后修改一下不一致的地方就可以了。以 demos、testhal 下的子目录为模板都可以,这里我们以 testhal\LPC17xx\1768\I2C 为例进行讲解:
E:\temp\ChibiOS-RT\testhal\LPC17xx\1768\I2C>ls -1
Makefile
chconf.h
halconf.h
main.c
mcuconf.h
ver.h
Makefile
先来看看 Makefile,最上面的部分定义了一些编译器选项、链接器选项等,这里基于篇幅所限,没有列出,不展开讲,后面用到的时候再单独讲。我们只看这些一般项目中会用到的部分:
# Define project name here
PROJECT = ch
# Imported source files and paths
CHIBIOS = ../../../..
include $(CHIBIOS)/boards/HY-LandTiger_1768/board.mk
include $(CHIBIOS)/os/hal/platforms/LPC17xx/platform.mk
include $(CHIBIOS)/os/hal/hal.mk
include $(CHIBIOS)/os/ports/GCC/ARMCMx/LPC17xx/port.mk
include $(CHIBIOS)/os/kernel/kernel.mk
include $(CHIBIOS)/os/various/devices_lib/devices_lib.mk
include $(CHIBIOS)/test/test.mk
# Define linker script file here
LDSCRIPT= $(PORTLD)/LPC1768_isp.ld
# C sources that can be compiled in ARM or THUMB mode depending on the global
# setting.
CSRC = $(PORTSRC) \
$(KERNSRC) \
$(TESTSRC) \
$(HALSRC) \
$(PLATFORMSRC) \
$(BOARDSRC) \
$(DEVICESLIBSRC) \
$(CHIBIOS)/os/various/evtimer.c \
$(CHIBIOS)/os/various/syscalls.c \
$(CHIBIOS)/os/various/chprintf.c \
main.c
这里,可以修改项目名称 PROJECT、ChibiOS 源码的根目录 CHIBIOS。
include $(CHIBIOS)/boards/HY-LandTiger_1768/board.mk
把这里的 HY-LandTiger_1768 替换为你所用的开发板,并确保 boards 目录中该开发板的子目录下已设置好相应的 mk 文件和板级文件 board.c 和 board.h 。
include $(CHIBIOS)/os/hal/platforms/LPC17xx/platform.mk
include $(CHIBIOS)/os/ports/GCC/ARMCMx/LPC17xx/port.mk
这两个地方的 LPC17xx 修改为你对应的平台。
LDSCRIPT= $(PORTLD)/LPC1768_isp.ld
这里的 LPC1768 修改为你所用处理器的链接脚本。
在实际项目中,针对每一种处理器,链接脚本又分为带 IAP 的版本、带 ISP 的版本和原生版本,这里所说的 IAP 和 ISP 都是指通过软件手段自动升级,而不需要通过硬件操作来打开系统的 ISP 使能管脚。这种机制在原来的 ChibiOS/RT 源代码中没有,是我后来加的,这里简要介绍一下:
自动 ISP 机制
以 NXP 的处理器为例,我们知道它是通过使能 ISPEN 信号来使系统运行 ISP 固件的,这种方法在开发阶段没什么问题,但是在产品实施阶段,或者交付后,这样做就有很大的问题,因为这种方法意味着产品外观上要留有打开 ISPEN 信号的开关,它所引起的问题有这样几方面:
- 影响美观。现在的产品都追求简洁之美,软件能解决的就不要增加额外的硬件。
- 增加产品结构上的复杂度,结构上复杂度的增加则意味着生产成本、组装成本的增加,结构的复杂及其带来的零部件增多还会增加采购、元器件供应方面的不可控环节。
- 容易误操作,不安全。对于用户来说,暴露出来的开关一定会有可能导致一些误操作。这对于企业的售后服务来说,无疑会增加工作量,严重的还会影响企业形象。
- 更有甚者,产品的安装环境很苛刻,根本就无法直接接触到设备,这在工业场合很常见。
基于上述问题,我们公司设计了一种软件自动 ISP 的机制,它的原理是:
- 设计一套用于 PC 机和产品中的用户程序(APP)进行通讯的串口协议。
- 开发一套 PC 机软件,通过该协议与产品中的软件协商是否可以升级。
- 如果可以升级,则 APP 擦除 FLASH 中的 0 扇区,然后通过看门狗使系统复位。
- 系统复位后发现 0 扇区的用户程序无效,于是开始运行芯片固件程序,等待 ISP。
- PC 机调用 FlashMagic 的接口开始 ISP 升级。
为了安全,我们的协议必须要有一定的验证措施,防止误升级无效的用户程序。链接脚本 LPC1768_isp.ld 中的这一部分就是用来指定验证信息的链接地址:
. = 0xd0;
KEEP(*(.update_cfg))
具体的配置信息,可以参考 os/various/update.c 和 os/various/update.h。
有了这样一套机制,就可以在 PC 机上一键完成用户程序的升级,非常方便。那么,既然已经这么方便了,为什么还需要什么自动 IAP 呢?嘿嘿,我可以负责任地说,很有必要!
IAP机制
我们知道串口 RS232 是点对点的,它是不支持组网的,那也就是意味着交付出去的产品只能一对一的升级。这种方式对于大多数公司问题不大。但是对于有些公司,比如我以前的公司,做列车电子设备的,他们的产品特点是:
- 设备必须组网,有主控端,有显示端,有被控端或采集端,他们通过工业网络连接成一个分布式控制系统,也有叫集散控制系统(Distributed Control System)的。
- 设备种类多,每一类设备在一个网络中可能有一个,也可能有十个,几十个。
- 设备极度分散,基本上分布在每节车厢。
- 设备安装、调试条件苛刻,有些要拆卸机箱、机架、甚至列车包厢的墙壁。
- 现场部署、售后服务人手非常有限。
在这种条件下,如果设备只能支持串口的自动 ISP 机制,那不仅仅是效率不够高的问题了,而是只能大呼:臣妾做不到啊!
基于这样的背景,我们开发了一套自动 IAP 系统,这套系统采用的机制是把最终生成的 hex 文件分为两部分,一部分成为 BOOT 程序,另一部分成为用户程序,BOOT 程序保持不变,每次升级时只需要升级用户程序。下面先看一张流程图:
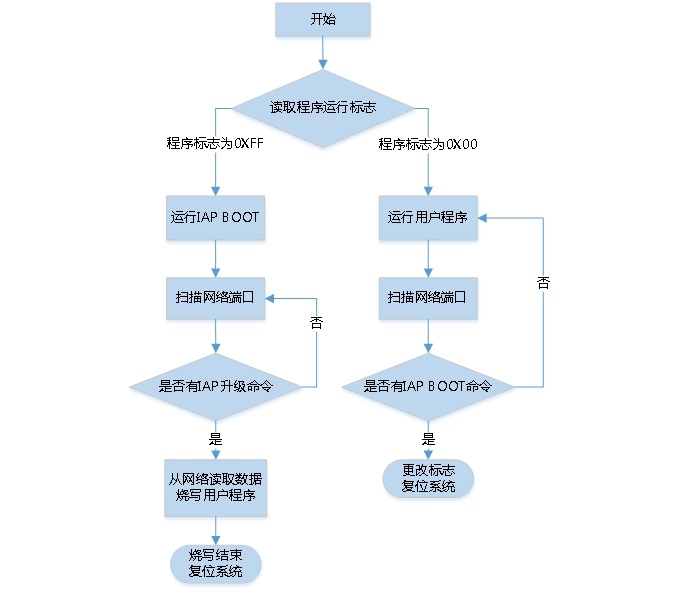
BOOT 程序
系统复位时,启动代码(严格的说这部分也是属于 BOOT 程序的一部分)首先会检查一个标志扇区,如果该标志扇区有效,则跳到用户程序的入口,把控制权交给用户程序。如果标志扇区无效,则 BOOT 程序则进入自己的程序逻辑,即扫描 UART0 和 CAN0 端口,等待升级包的出现。BOOT 程序不需要带操作系统,它的主要作用就是通过 CAN0 来升级用户程序,这样做的目的上面已经讲述过了。当然,BOOT 程序仍然支持自动 ISP 方式的升级,以便于升级 BOOT 程序自身。
用户程序
我们这里讲述和即将编译的都是用户程序,从前面的讲述可以看出,在 IAP 机制下,BOOT 程序的中断向量表位于 0 地址,所以用户程序的中断向量表必须映射到其他地址,这一设置就是通过 IAP 版本的链接脚本来实现的:
flash : org = 0x00008000, len = 512k - 32k
这里也顺便提醒一下,通过 FlashMagic 单独烧写用户程序到芯片中是无法运行的,因为中断向量表的链接地址和烧写地址对不上,必须通过我们的工具 HexMerger 把 BOOT 程序和用户程序合为一个 HEX 文件再烧写才可以。
IAP 的话题先讲到这里,我们继续回来讲 Makefile, 如果你的项目所选用的处理器不是 cortex-m3 架构的,那么将此处的 MCU 值修改为其他架构,例如: arm7, cortex-m3 等:
MCU = cortex-m3
此 Makefile 中剩下的部分基本不需要再动。
chconf.h
chconf.h 是定义操作系统的一些重要信息,一般不需要改变,需要改变时看代码里的注释即可。 需要说明一下的是这一部分:
#define ENABLE_IAP TRUE
#if ENABLE_IAP
/**
* @brief NVIC VTOR initialization expression.
*/
#define CORTEX_VTOR_INIT 0x00008000
#endif /* #if ENABLE_IAP */
这一部分也是为了配合 IAP 机制而设的,需要打开 IAP 时,将 ENABLE_IAP 开关设为 TRUE,否则设为 FALSE 。
halconf.h
halconf.h 是用于配置硬件抽象层的一些开关和变量,例如,HAL_USE_SPI 用于配置是否打开 SPI,所有这些模块如果你的项目中没有使用,建议全部设为 FALSE, 将其关闭,这样做一是可以减小功耗,二可以减小二进制文件的尺寸。
仔细观察可以看出, halconf.h 是与平台无关的,这也正是 HAL (硬件抽象层)的意义所在。
mcuconf.h
mcuconf.h 用于配置芯片的一些参数,例如:主时钟选择,主PLL 配置,外围时钟配置等等,这部分定义非常重要,请配合时钟初始化代码自行研究,以 LPC1768 为例,时钟初始化代码位于 ChibiOS-RT\os\hal\platforms\LPC17xx\
mcuconf.h 中还有一些宏定义是用于配置底层模块的,这部分是位于 HAL 层之下的,是与芯片平台相关的,所以放在这里最合适。
ver.h
ver.h 中定义了设备的 ID 和用户程序的版本号,这在实际项目中都是必须要考虑的,前面讲过的 ISP、IAP 机制也会用到这两个值。
main.c
main.c 是用户程序的入口,它负责初始化 HAL、操作系统,启动所需的 HAL 模块,启动升级线程,创建工作线程等等:
halInit();
chSysInit();
updateThreadStart();
gptStart(&GPTD1, &gpt1cfg);
UART0 一般用来做为 printf 的打印输出端口,它的初始化我放到了 boardInit 里了,因为只有它工作了,才能更方便的调试。
编译
好了,一切准备就绪就可以开始编译了,在当前目录执行 make 就可以了:
E:\temp\ChibiOS-RT\testhal\LPC17xx\1768\I2C>make
Compiler Options
arm-none-eabi-gcc -c -mcpu=cortex-m3 -O2 -ggdb -fomit-frame-pointer -ffunction-sections -fdata-sections -fno-common -Wall -Wextra -Wstrict-prototypes
-Wa,-alms=build/lst/ -DLPC17XX -D__NEWLIB__ -DTHUMB_PRESENT -mno-thumb-interwork -DTHUMB_NO_INTERWORKING -MD -MP -MF .dep/build.d -I. -I../../../../os
/ports/common/ARMCMx/CMSIS/include -I../../../../os/ports/common/ARMCMx -I../../../../os/ports/GCC/ARMCMx -I../../../../os/ports/GCC/ARMCMx/LPC17xx -I
../../../../os/kernel/include -I../../../../test -I../../../../os/hal/include -I../../../../os/hal/platforms/LPC17xx -I../../../../boards/HY-LandTiger
_1768 -I../../../../os/various/devices_lib/ -I../../../../os/various/devices_lib/accel/ -I../../../../os/various/devices_lib/eeprom/ -I../../../../os/
various main.c -o main.o
mkdir -p build/obj
mkdir -p build/lst
Compiling crt0.c
Compiling vectors.c
Compiling chcore.c
Compiling chcore_v7m.c
Compiling nvic.c
Compiling chsys.c
Compiling chdebug.c
Compiling chlists.c
Compiling chvt.c
Compiling chschd.c
...
有时候需要清除一下编译文件:
E:\temp\ChibiOS-RT\testhal\LPC17xx\1768\I2C>make clean
Cleaning
rm -fR .dep build
Done
注意,该命令会删除 .dep 和 build 两个子目录,不要在这两个目录放重要的文件。此外,如果这两个目录中的文件被占用(常出现的情况是 build 目录中的 HEX 文件被 FlashMagic 或者 ISP、IAP 升级软件占用),那么 make clean 会失败:
E:\temp\ChibiOS-RT\testhal\LPC17xx\1768\I2C>make clean
Cleaning
rm -fR .dep build
rm: cannot remove directory `build': Permission denied
make: [clean] Error 1 (ignored)
Done
而且这会影响到下次 make 也失败:
E:\temp\ChibiOS-RT\testhal\LPC17xx\1768\I2C>make
Compiling crt0.c
Assembler messages:
Fatal error: can't create build/obj/crt0.o: No such file or directory
make: *** [build/obj/crt0.o] Error 1
遇到这种情况时,关闭一下占用 build 目录的软件再重新 make clean 就可以了。
本篇结束。